Separatrix Locator
Finding Separatrices with Deep squashed Koopman Eigenfunctions
TL;DR
Separatrices! These are boundaries between basins of attraction in dynamical systems. In high-dimensional systems like Recurrent Neural Networks, finding these boundaries can help reverse engineer their mechanism, or design optimal perturbations. But finding them is far from trivial. We recently developed a numerical method, based on approximating a Koopman Eigenfunction (KEF) of the dynamics using a deep neural network (DNN)
Code: We provide a Python package implementing this method at github.com/KabirDabholkar/separatrix_locator.
Interactive version: if the interactive plots below don’t work click here.
Introduction: Fixed Points and Beyond
Many natural and artificial systems — from neural circuits making decisions to ecosystems switching between healthy and diseased states — are modelled as multistable dynamical systems. Their behaviour is governed by multiple attractors in state space, each corresponding to a stable mode of activity. Understanding these systems often boils down to understanding their geometry: where are the stable states, and how are the different basins of attraction separated?
For the last decade, a workhorse of neural circuit analysis has been fixed point analysis. By finding points where the flow vanishes and linearising around them, one can uncover local motifs underlying computation: line attractors, saddle points, limit cycles, and so on. This has yielded powerful insights into how trained RNNs implement cognitive tasks.
Finding Fixed Points
First consider a bistable dynamical system in 2 dimensions. Below is a phase-portrait of such a system, with two stable fixed points and one unstable fixed point. Click on plot to realise trajectories of the dynamics.
(click here if the plot below doesn’t load)
Trajectories converge to either one of the two fixed points. This naturally suggests an algorithm: run the dynamics from many initial conditions to find the stable fixed points.
Now try to click somewhere that will lead you exactly to the saddle point. Did you succeed? It’s almost impossible.
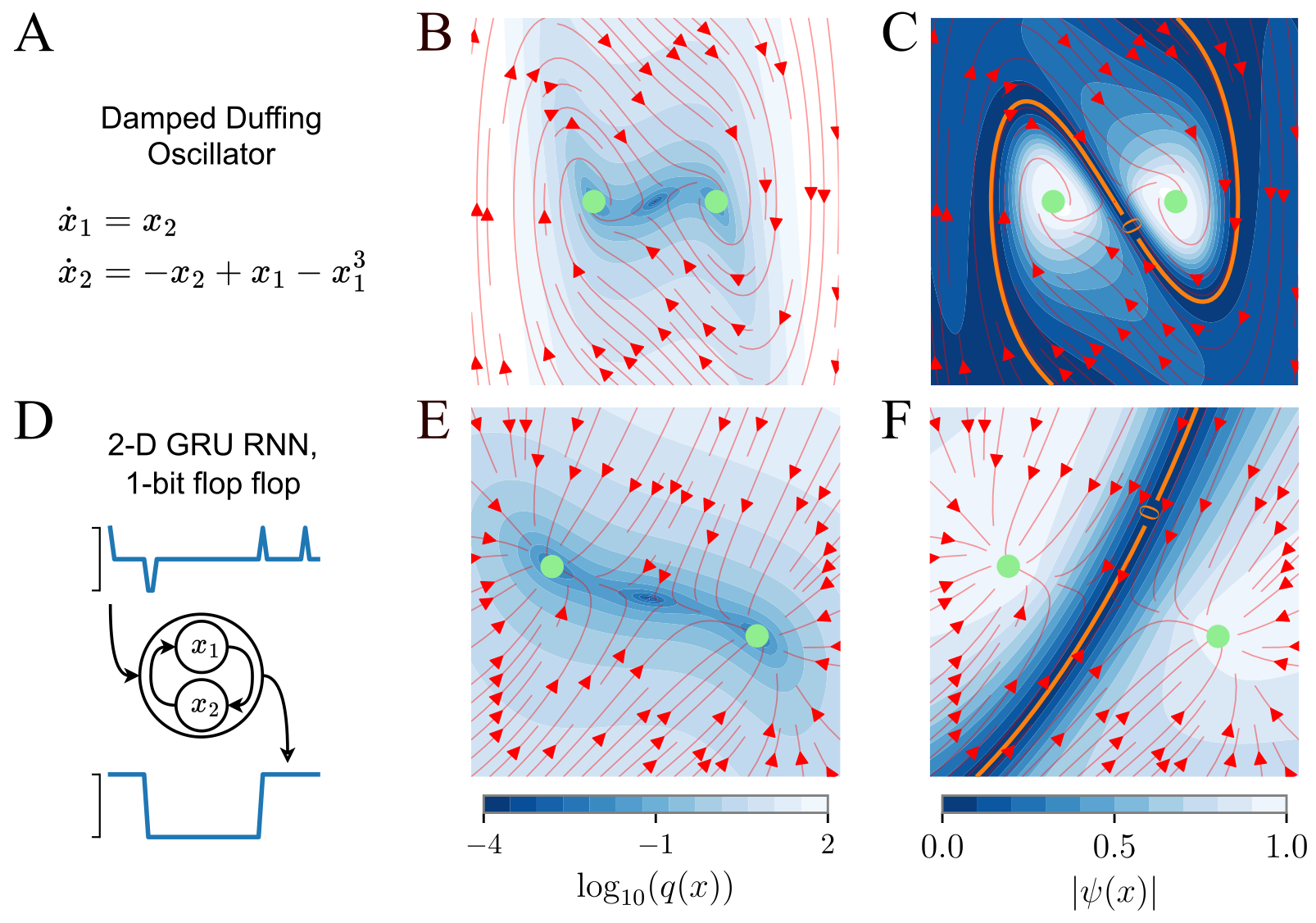
This motivates developing a principled way to find such points. One solution is to define a specific scalar function of the dynamics whose only minima are given by all the fixed points. One such function is the kinetic energy \(q(\boldsymbol x)=\frac{1}{2}\Vert f(\boldsymbol x)\Vert^2\)
(click here if the plot below doesn’t load)
Now we can find both stable and unstable fixed points. Linearising around the fixed points provides an interpretable approximation of the dynamics in the neighbourhood of those points. Several works adopt this approach of fixed point finding to reverse-engineer either task-trained or data-trained RNNs
But fixed points are only half the story.
When a system receives a perturbation — for example, a sensory input or an optogenetic pulse — the key question is often not where it started, but which side of the separatrix it ends up on. The separatrix is the boundary in state space separating different basins of attraction. Crossing it means switching decisions, memories, or ecological states. Failing to cross means staying put. For high-dimensional systems, these boundaries are typically nonlinear, curved hypersurfaces, invisible to fixed points and local linearisations around them.
What if we could learn a single smooth scalar function whose zero level set is the separatrix?
Below is an example of such a function that we constructed for this simple system (click on it to run trajectories).
(click here if the plot below doesn’t load)
Our main contribution is a numerical method to approximate such functions using deep neural networks in order to find separatrices in multistable dynamical systems in high-dimensions.
Setting
We consider autonomous dynamical flows of the form:
\[\begin{equation} \dot{\boldsymbol{x}} = f(\boldsymbol{x}) \label{eq:ODE} \end{equation}\]governing the state \(\boldsymbol{x} \in \mathbb R^N\), where \(\dot \square\) is shorthand for the time derivative \(\frac{d}{dt}\square\) and \(f: \mathbb R^N \to \mathbb R^N\) defines the dynamical flow.
The Goal:
Find a smooth scalar function \(\psi:\mathbb{R}^N\to\mathbb{R}\) that grows as we move away from the separatix, i.e., \(\psi(\boldsymbol x)=0\) for \(x\in\text{separatrix}\) and grows as it moves away from the separatrix.
The Sandwich of Bistability
Any bistable system can be decomposed as follows: it will have two attractors, their respective basins of attraction and the separatrix between them. This is like a cheese sandwich: the attractors are slices of bread, and the separatrix is the slice of cheese between them. We can call this the Sandwich of Bistability. In general, this sandwich could be arbitrarily oriented in \(\mathbb R^N\) and even nonlinearly warped.
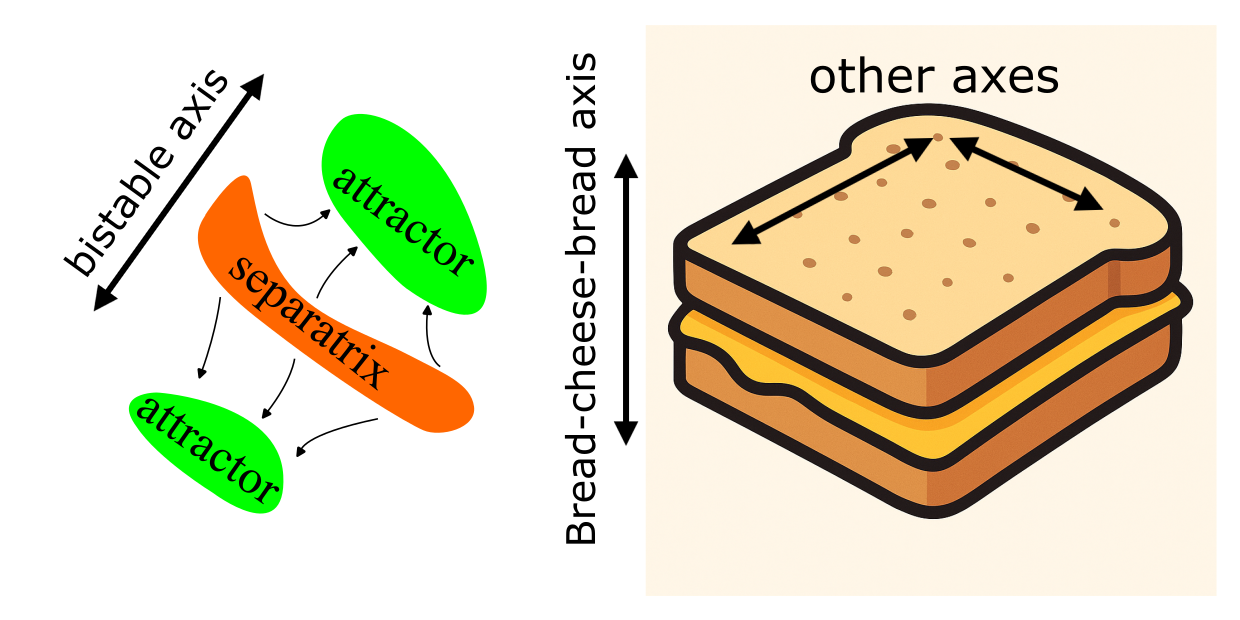
With our scalar function \(\psi:\mathbb{R}^N\to\mathbb{R}\) we would like to perform a special type of dimensionality reduction: we only care to identify our location along the attractor–separatrix–attractor axis, i.e., along the depth of sandwich.
One way to achieve this is to have this scalar observable \(\psi(\boldsymbol x)\) imitate the bistable dynamics along this axis. Thus we pick a simple example of bistable dynamics in 1D (hover your cursor over it to see the plot):
with \(\lambda>0\), dropping the \(\boldsymbol x\) notation for a moment for clarity. This system has fixed point attractors at \(\pm 1\) and an unstable fixed point (a separatrix) at \(0\) – a 1D Sandwich of Bistability.
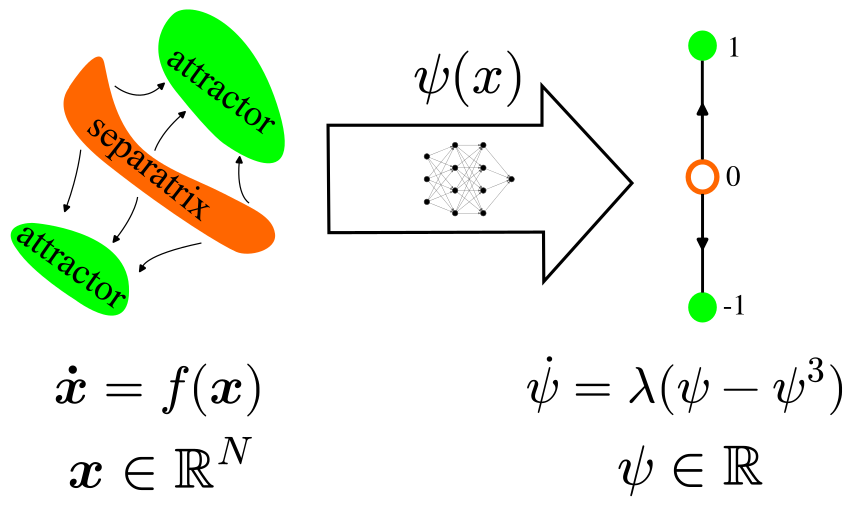
Now we want to couple the \(\psi\) dynamics with the \(\boldsymbol x\) dynamics so we bring back the \(\boldsymbol x\) dependence. Specifically as \(\boldsymbol x(t)\) evolves in time according to \(\eqref{eq:ODE}\):
\[\begin{equation} \frac{d}{dt}\bigg(\psi\big(\boldsymbol{x}(t)\big)\bigg) = \lambda\bigg[\psi\big(\boldsymbol{x}(t)\big) - \psi\big(\boldsymbol{x}(t)\big)^3\bigg]. \label{eq:sKEF} \end{equation}\]This means that if we were to observe the value of \(\psi(\boldsymbol x)\) as \(\boldsymbol x\) evolved in time, that value would evolve according \(\eqref{eq:sKEFsimple}\).
It seems that finding solutions to \(\eqref{eq:sKEF}\) could be the key to constructing a separatrix locator. The value \(\psi(\boldsymbol x)\) would be the coordinate of \(\boldsymbol x\) along the bistable axis. This value would be \(0\) when \(\boldsymbol x\) is anywhere on the separatrix, exactly our stated goal.
(squashed) Koopman Eigenfunctions
At this stage, it’s worth noticing that the left hand side of \(\eqref{eq:sKEF}\) is actually a known object called the Lie derivative of \(\psi\) along the flow given by \(f\), and also known as the infinitesimal generator of the Koopman operator, (See
To make this link explicit, we first define the propagator function \(F_\tau(x(t)):=x(t+\tau)\) where \(x(t)\) is any solution to \(\eqref{eq:ODE}\). The Koopman operator \(\mathcal K_\tau\) is defined as
\[\mathcal K_\tau g = g \circ F_\tau\]where \(g\) is any
The last version if evaluated on a trajectory \(x(t)\) is the left hand side of \(\eqref{eq:sKEF}\), allowing us to rewrite it compactly as
\[\begin{equation} \mathcal K\psi = \lambda (\psi-\psi^3). \label{eq:sKEF_compact} \end{equation}\]This equation is almost an eigenfunction equation. All we need is to drop the cubic term:
\[\begin{equation} \mathcal K\phi = \lambda \phi. \label{eq:KEF} \end{equation}\]In fact, the two problems are closely related. We can show that solutions to \(\eqref{eq:KEF}\) can be transformed into solutions of \(\eqref{eq:sKEF_compact}\) and vice versa by squashing and unsquashing. If \(\phi\) is a solution to \(\eqref{eq:KEF}\), then we can obtain a solution \(\psi\) to \(\eqref{eq:sKEF_compact}\) via:
\[\begin{equation} \psi(\boldsymbol{x}) = \frac{ \phi(\boldsymbol{x})}{ \sqrt{1+\phi(\boldsymbol{x})^2} } \label{eq:squash} \tag{squash} \end{equation}\]Conversely, if \(\psi\) is a solution to \(\eqref{eq:sKEF_compact}\), then we can obtain a solution \(\phi\) to \(\eqref{eq:KEF}\) via:
\[\begin{equation} \phi(\boldsymbol{x}) = \frac{ \psi(\boldsymbol{x})}{ \sqrt{1-\psi(\boldsymbol{x})^2} } \label{eq:unsquash} \tag{unsquash} \end{equation}\]We provide an informal derivation.
Derivation: From eigenfunction to squashed eigenfunction and back
To do this, define the pointwise transforms \(\psi \;=\; u(\phi) \;:=\; \frac{\phi}{\sqrt{1+\phi^2}}, \qquad \phi \;=\; v(\psi) \;:=\; \frac{\psi}{\sqrt{1-\psi^2}}.\)
First we will derive useful identity: the chain rule for the Koopman generator.
Koopman chain rule
Let \(\phi:\mathbb R^N \to \mathbb R\) be a smooth scalar observable, and let \(u:\mathbb R \to \mathbb R\) be a smooth scalar nonlinearity. Let \(\psi(\boldsymbol x) = u(\phi(\boldsymbol x)).\)
The Koopman generator is
\[\mathcal K g(\boldsymbol x) = \nabla g(\boldsymbol x)\cdot f(\boldsymbol x),\]for any \(g\) where \(f(\boldsymbol x)\) is the underlying vector field.
By the multivariable chain rule for gradients,
\[\nabla \psi(\boldsymbol x) = u'\big(\phi(\boldsymbol x)\big)\,\nabla \phi(\boldsymbol x).\]Applying the Koopman generator gives
\[\mathcal K \psi(\boldsymbol x) = \nabla \psi(\boldsymbol x)\cdot f(\boldsymbol x) = u'\big(\phi(\boldsymbol x)\big)\,\nabla \phi(\boldsymbol x)\cdot f(\boldsymbol x) = u'\big(\phi(\boldsymbol x)\big)\,\mathcal K \phi(\boldsymbol x).\]Therefore, for any smooth \(u\) and \(\phi\),
\[\boxed{\;\mathcal K[u(\phi)] = u'(\phi)\,\mathcal K\phi\; }.\]From \(\mathcal K\phi=\lambda\phi\) to \(\mathcal K\psi=\lambda(\psi-\psi^3)\)
Assume \(\mathcal K\phi \;=\; \lambda \phi.\)
Recall that \(\psi = u(\phi)\) where \(u(z)=\dfrac{z}{\sqrt{1+z^2}}\). Compute \(u'(z)\):
\[\begin{align*} u'(z) &= (1+z^2)^{-\frac{1}{2}} + z\cdot\Big(-\frac{1}{2}\Big)(1+z^2)^{-\frac{3}{2}}\cdot (2z) \\[2pt] &= (1+z^2)^{-\frac{1}{2}} - z^2(1+z^2)^{-\frac{3}{2}} \\[2pt] &= \frac{1+z^2-z^2}{(1+z^2)^{\frac{3}{2}}} \\[2pt] &= \frac{1}{(1+z^2)^{\frac{3}{2}}} \end{align*}\]By the Koopman chain rule,
\[\mathcal K\psi \;=\; u'(\phi)\,\mathcal K\phi \;=\; \frac{1}{(1+\phi^2)^{3/2}}\,\lambda\phi \;=\; \lambda\,\frac{\phi}{(1+\phi^2)^{3/2}}.\]But
\[\psi - \psi^3 = \frac{\phi}{\sqrt{1+\phi^2}} - \frac{\phi^3}{(1+\phi^2)^{3/2}} = \frac{\phi(1+\phi^2)-\phi^3}{(1+\phi^2)^{3/2}} = \frac{\phi}{(1+\phi^2)^{3/2}}.\]Hence \(\boxed{\;\mathcal K\psi \;=\; \lambda(\psi-\psi^3)\; }.\)
From \(\mathcal K\psi=\lambda(\psi-\psi^3)\) back to \(\mathcal K\phi=\lambda\phi\)
Assume \(\mathcal K\psi \;=\; \lambda(\psi-\psi^3).\)
Recall that \(\phi = v(\psi)\) where \(v(z)=\dfrac{z}{\sqrt{1-z^2}}\). Compute \(v'(z)\):
\[\begin{align*} v'(z) &= (1-z^2)^{-\frac{1}{2}} + z\cdot\frac{1}{2}(1-z^2)^{-\frac{3}{2}}\cdot (2z) \\[2pt] &= (1-z^2)^{-\frac{1}{2}} + z^2(1-z^2)^{-\frac{3}{2}} \\[2pt] &= \frac{1}{(1-z^2)^{\frac{3}{2}}} \end{align*}\]Apply the Koopman chain rule with \(\phi=v(\psi)\):
\[\mathcal K\phi \;=\; v'(\psi)\,\mathcal K\psi \;=\; \frac{1}{(1-\psi^2)^{3/2}}\,\lambda(\psi-\psi^3) \;=\; \lambda\,\frac{\psi(1-\psi^2)}{(1-\psi^2)^{3/2}} \;=\; \lambda\,\frac{\psi}{\sqrt{1-\psi^2}} \;=\; \lambda\,\phi.\]Thus \(\boxed{\;\mathcal K\phi \;=\; \lambda \phi\; }.\)
Conclusion
The pointwise transforms \(\psi = u(\phi) = \frac{\phi}{\sqrt{1+\phi^2}}, \qquad \phi = v(\psi) = \frac{\psi}{\sqrt{1-\psi^2}}\)
carry solutions of the linear Koopman eigenfunction equation to solutions of the cubic equation and back: \(\mathcal K\phi=\lambda\phi \quad\Longleftrightarrow\quad \mathcal K\psi=\lambda(\psi-\psi^3).\)
Note that this derivation is highly non-rigorous. We gloss over the square integrability of \(\psi\) and \(\phi\), and even whether they are defined everywhere in \(\mathbb R^N\). According to our sandwich of bistability, we expect \(\psi(\boldsymbol {x^*})=\pm1\) at the attractors. According to \(\eqref{eq:unsquash}\), \(\phi(\boldsymbol {x^*})=\pm\infty\),
Enter Deep Neural Networks
Now that we know the properties of the desired \(\psi\), it’s time to find it. So how do we solve the \(\eqref{eq:sKEF}\) for a high-dimensional nonlinear system. This is where deep neural networks (DNNs) come in…
First we re-write \(\eqref{eq:sKEF}\) as a partial differential equation (PDE):
\[\begin{equation} \nabla_{\boldsymbol{x}}\psi(\boldsymbol{x}) \cdot f(\boldsymbol{x}) = \lambda[\psi(\boldsymbol{x}) - \psi(\boldsymbol{x})^3], \label{eq:sKEFPDE} \end{equation}\]recognising that \(\mathcal Kg=\nabla g \cdot f\) is another way to write the Koopman generator, using the multivariate chain rule on \(\eqref{eq:koopman_generator}\). This PDE means that instead of running the ODE \(\eqref{eq:ODE}\) to get trajectories \(\boldsymbol x(t)\), we can instead leverage the ability of DNNs to solve PDEs.
We formulate a mean squared error loss for PDE \(\eqref{eq:sKEFPDE}\):
\[\begin{equation} \mathcal{L}_{\text{PDE}} = \mathbb{E}_{\boldsymbol{x} \sim p(\boldsymbol{x})} \Bigg[ \nabla \psi(\boldsymbol{x}) \cdot f(\boldsymbol{x}) - \lambda \Big(\psi(\boldsymbol{x})-\psi(\boldsymbol{x})^3\Big) \Bigg]^2, \label{eq:pde_loss} \end{equation}\]where \(p(\boldsymbol{x})\) is a distribution over the phase space
Naturally, this doesn’t work out of the box. There are quite a few challenges – some common to eigenvalue problems, and some unique to our setting. You can click on them to find out more about why they arise, and how we solve them.
Trivial solutions
As with any eigenvalue problem, this loss admits the trivial solution \(\psi \equiv 0\). To discourage such solutions, we introduce a shuffle-normalization loss where the two terms are sampled independently from the same distribution:
\[\begin{equation} \mathcal{L}_{\text{shuffle}} = \mathbb{E}_{\boldsymbol{x} \sim p(\boldsymbol{x}), \tilde{\boldsymbol{x}} \sim p(\boldsymbol{x})} \Bigg[ \nabla \psi(\boldsymbol{x}) \cdot f(\boldsymbol{x}) - \lambda \Big(\psi(\tilde{\boldsymbol{x}}) - \psi(\tilde{\boldsymbol{x}})^3\Big) \Bigg]^2, \end{equation}\]and optimise the ratio:
\[\begin{equation}\mathcal{L}_{\text{ratio}} = \frac{\mathcal{L}_{\text{PDE}}}{\mathcal{L}_{\text{shuffle}}}. \label{eq:ratio loss} \end{equation}\]Degeneracy across basins
Koopman eigenfunctions (KEFs) have an interesting property: a product of two KEFs is also a KEF. This can be seen by applying the PDE to the product of two such functions
\[\begin{equation} \nabla[\phi_1(x)\phi_2(x)] \cdot f(x) = (\lambda_1 + \lambda_2) \phi_1(x)\phi_2(x). \end{equation}\]We’ll soon see that this translates to squashed KEFs as well. First, consider a smooth KEF \(\phi^1\) with \(\lambda = 1\) that vanishes only on the separatrix (what we want). Now, consider a piecewise-constant function \(\phi^0\) with \(\lambda = 0\) that is equal to 1 on one basin, and zero on another basin. The product \(\phi^1 \phi^0\) remains a valid KEF with \(\lambda = 1\), but it can now be zero across entire basins—thereby destroying the separatrix structure we aim to capture. Because of the relation between KEFs and sKEFs, this problem carries over to our squashed case. To mitigate this problem, we add another regulariser that causes the average value of \(\psi\) to be zero, encouraging negative and positive values on both sides of the separatrix.
Degeneracy in high dimensions
If the flow itself is separable, there is a family of KEFs that can emphasise one dimension over the others. Consider a 2D system \(\dot{x} = f_1(x), \quad \dot{y} = f_2(y)\), and the KEFs \(A(x)\) and \(B(y)\). There is a family of valid solutions \(\psi(x, y) = A(x)^{\mu} B(y)^{1 - \mu}\), for \(\mu \in R\).
If \(\mu=0\) for instance, the \(x\) dimension is ignored. To mitigate this, we choose distributions for training the DNN that emphasise different dimensions, and then combine the results.
Does It Work?
Now that we know what we are looking for (PDE equation), and how to find it (DNN), let’s put it all together. We train a DNN on a bistable damped oscillator, and on a 2D GRU trained on a 1-bit flip-flop task. In both cases, the resulting \(\psi\) has a zero level set on the separatrix.
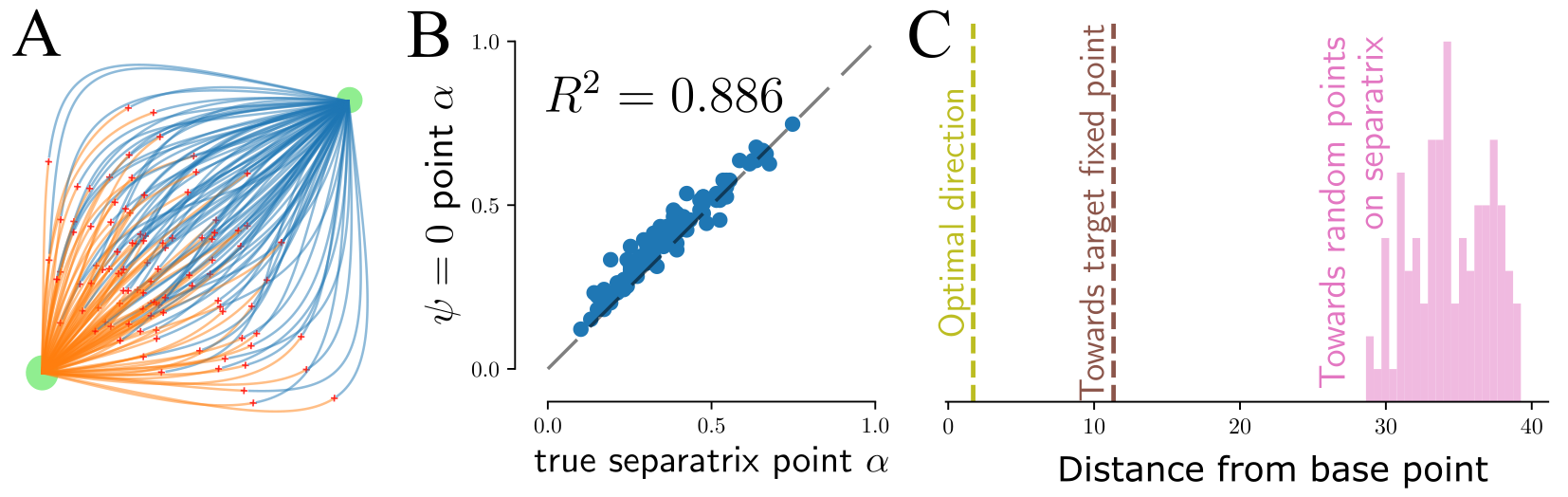
Finally, we take a published \(N=668\) unit RNN trained to reproduce the activity of neurones from anterior lateral motor cortex of mice trained to respond to optogenetic stimulation of their somatosensory cortex
Summary and Outlook
Making sense of high-dimensional dynamical systems is not trivial. We added another tool to the toolbox – a separatrix finder. More generally, one can think of our cubic \(\eqref{eq:sKEFsimple}\) as a normal form for bistability. This is a canonical, or simple, version of a dynamical system with the same topology. Our method allows to reduce the high-D dynamics into such a form. In the future, we hope to extend this to many more applications. Check out our code and apply it to your own dynamical systems. Feel free to reach out to us, we’re excited to help and learn about new applications!